
















ClearPath All-In-One Servos
ClearPath Overview
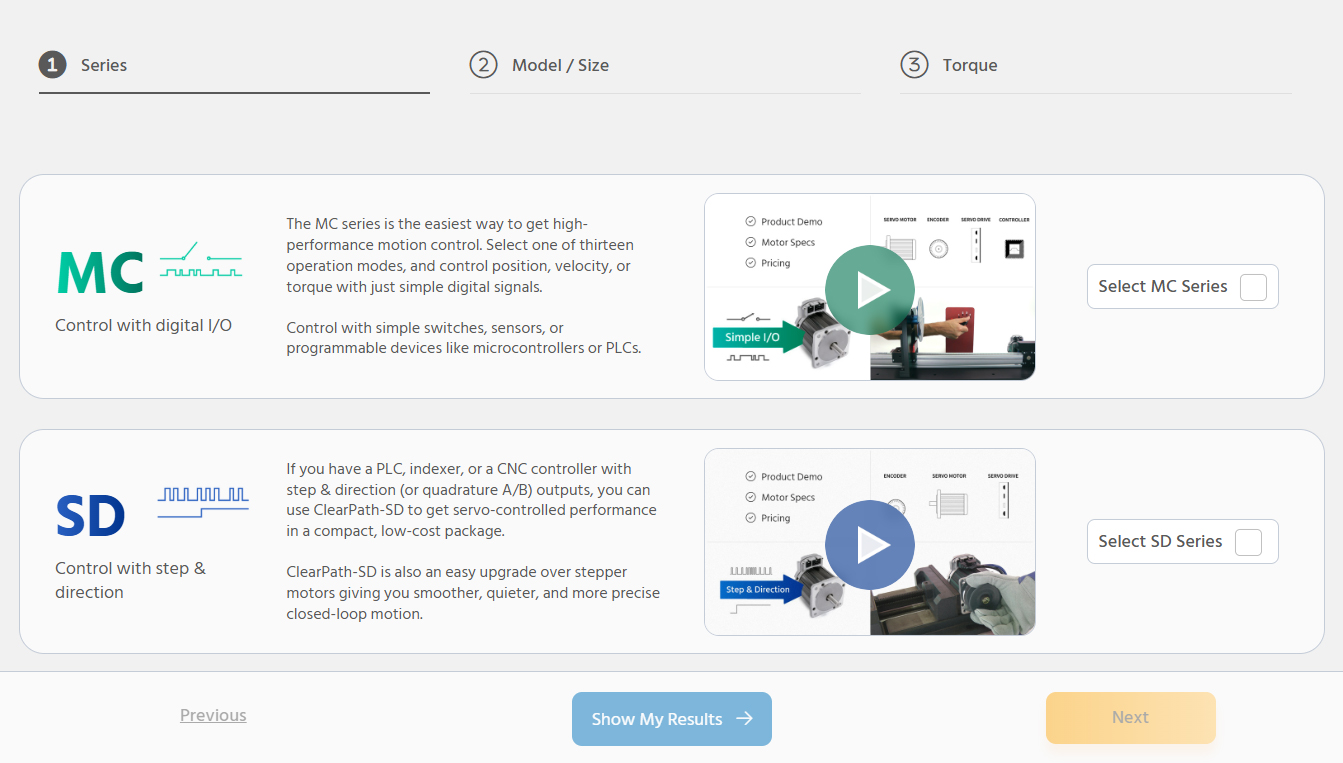
Choose Series
Motor Selection Guide
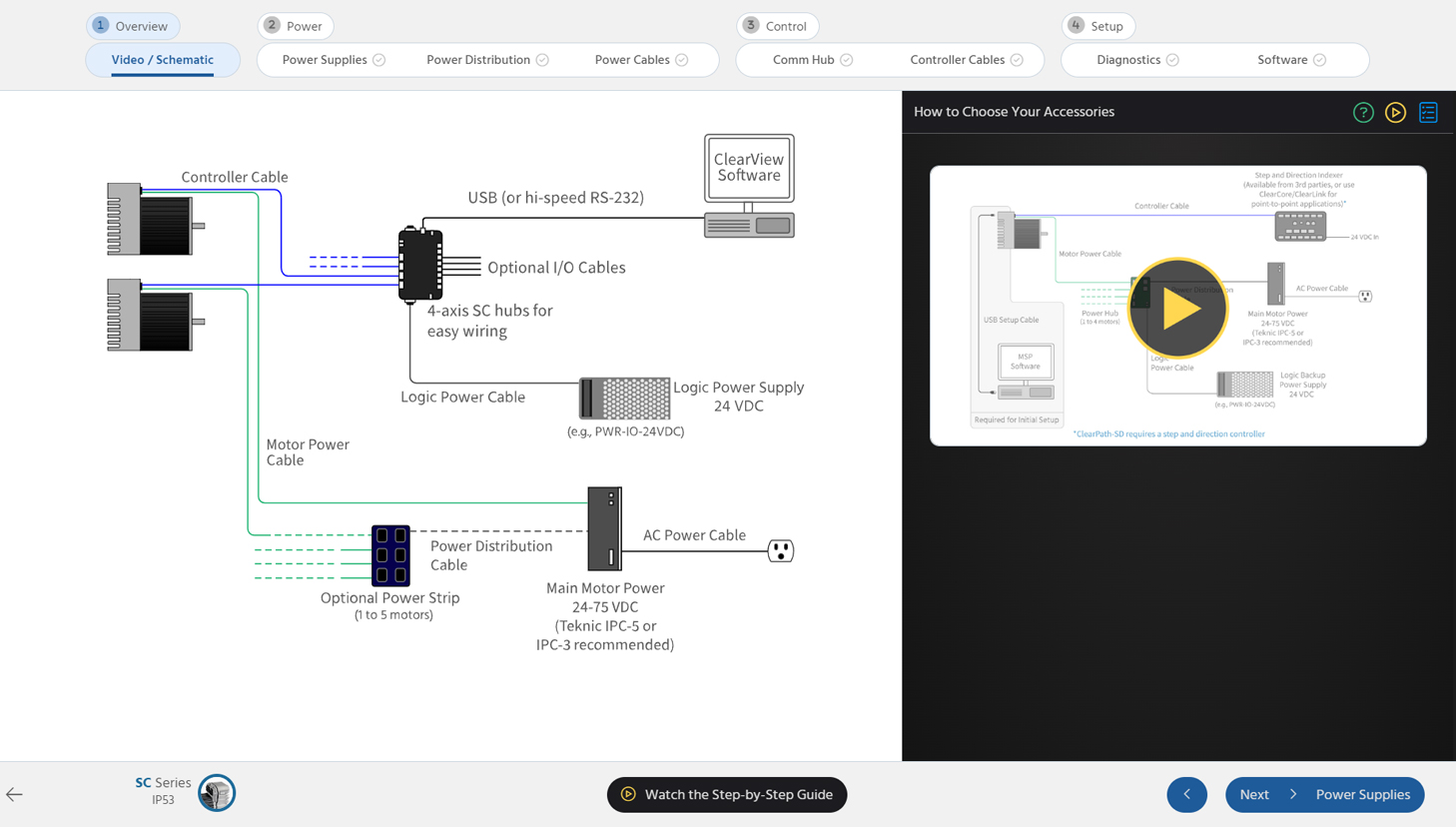
Accessories Guide
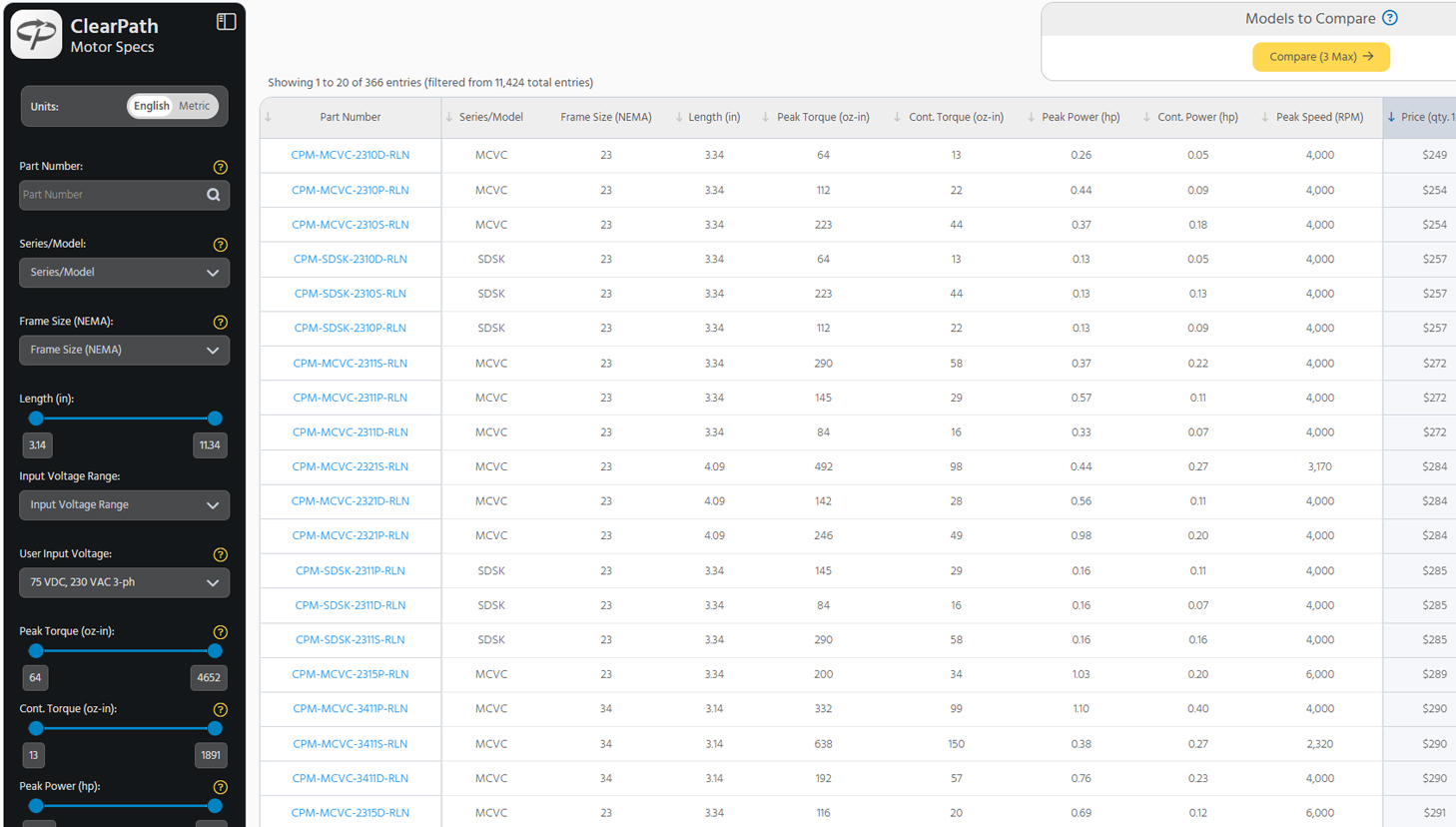
Motor Specs
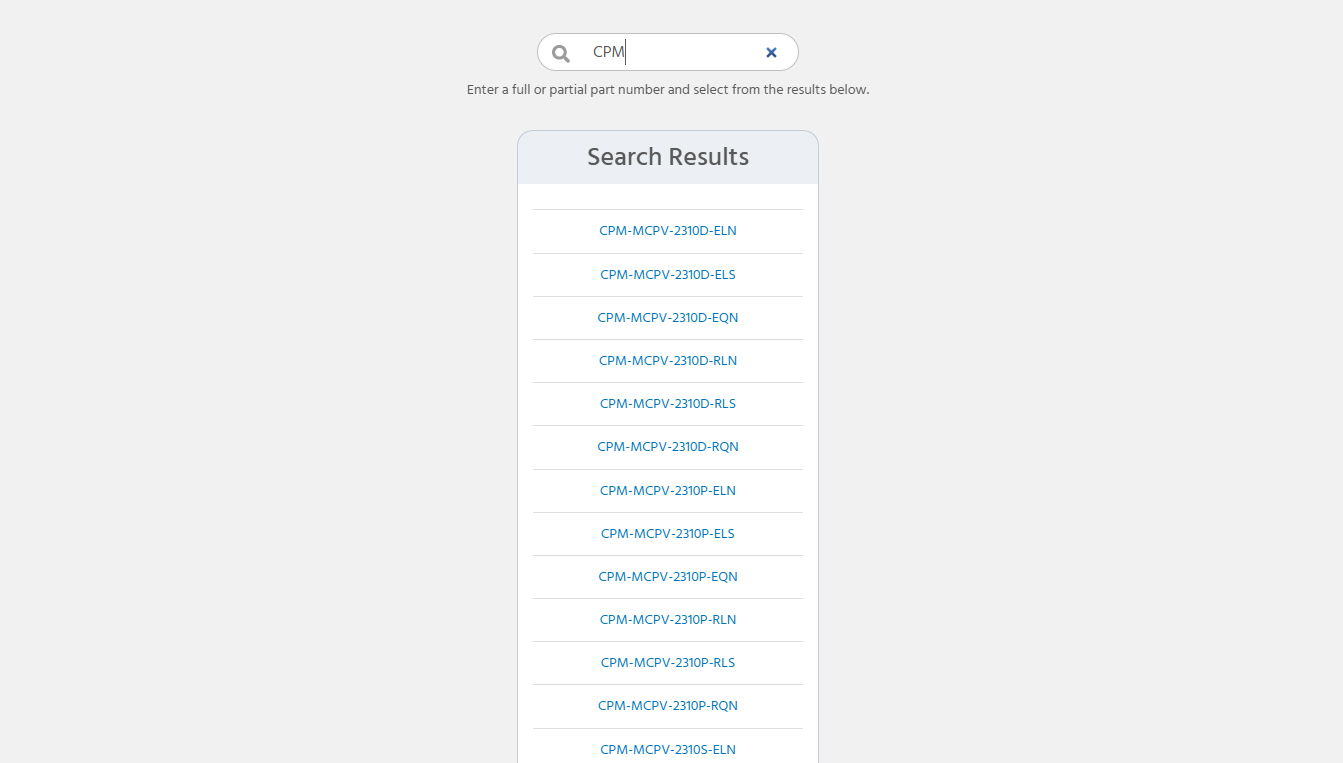
Index: All Motors/Accessories
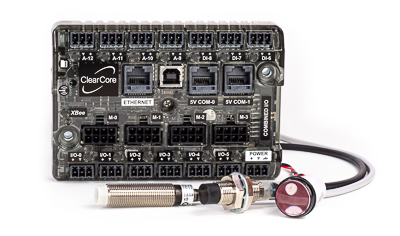
ClearCore I/O & Motion Controller
IPC DC Power Supplies
Hudson BLDC Servo Motors
Meridian Integrated Controllers
Eclipse Digital Servo Drives
Motor Brakes
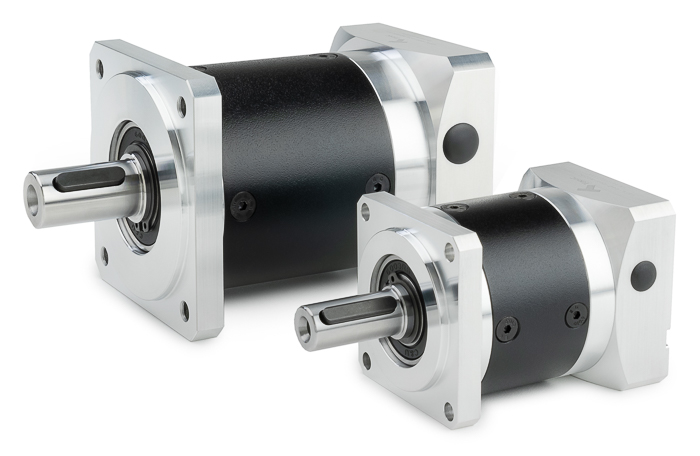
Planetary Gearboxes
Other Products